学术咨询服务正当时学报期刊咨询网是专业的学术咨询服务平台!
发布时间:2021-07-17 15:44所属平台:学报论文发表咨询网浏览: 次
摘要:针对电动后视镜驱动器振动信号非平稳非线性及信噪比低,提取传统特征难以有效识别样本故障状态的问题,提出了一种改进的集成经验模态分解算法(EEMD)。使用EEMD对振动信号进行了分解,利用相关系数与峭度系数筛选有效本征模态函数(IMF)分量。应用自回归
摘要:针对电动后视镜驱动器振动信号非平稳非线性及信噪比低,提取传统特征难以有效识别样本故障状态的问题,提出了一种改进的集成经验模态分解算法(EEMD)。使用EEMD对振动信号进行了分解,利用相关系数与峭度系数筛选有效本征模态函数(IMF)分量。应用自回归模型(AR)功率谱估计方法,建立最佳阶次的AR模型,对有效IMF分量进行谱估计,并得到有效IMF分量的AR谱与AR累加谱。将AR累加谱的特征频率点与振幅作为特征向量,使用支持向量机(SVM)进行机器学习与分类。研究结果表明:EEMD-AR-SVM模型在实验中的分类准确率达到了93.9%,平均耗时46.1s,达到了工业中自动检测的标准。
关键词:机械故障诊断;集成经验模态分解算法;IMF筛选;AR功率谱估计;支持向量机
0引言电动后视镜凭借其调节方便和驻车收缩等功能特点,在小型轿车中逐渐普及。后视镜驱动器作为电动后视镜核心部件,相比于传统机械后视镜,在驱动器部分发生故障的概率较高。电动后视镜驱动器中存在的微小故障将会导致调节角度不到位及视野受限等问题,从而威胁驾驶安全。因此,有必要对电动后视镜的驱动器进行故障诊断研究。目前,针对旋转机械的故障诊断常用的信号时频分析方法有:傅里叶变换[1](Fouriertransform,FT)、短时傅里叶变换[2](shorttimeFouriertransform,STFT)、维格纳分布[3](Winger-Villedistribution,WVD)和小波变换[4](wavelettransform,WT)等。
电力机械论文范例:新型电动爬楼梯运输车
文献[5]使用傅里叶变换结合多滤波器进行机械故障诊断,但傅里叶变换是基于线性系统和稳定信号的假设前提下应用的方法,存在一定的局限性。针对传统傅里叶变换的不足,文献[6-8]将STFT应用在机械故障诊断中,但是该方法同时受到时间分辨率与频率分辨率的约束。文献[9-11]提到了小波变换在机械故障诊断中的应用,但是小波基函数的选择对结果影响较大。经验模态分解[12](empiricalmodedecomposition,EMD)方法依据输入振动信号自身的特点,自适应地将振动信号分解成若干个固有模态函数之和,不依赖窗口与基函数的选取。
文献[13-14]研究了EMD方法在电机故障诊断及轴承故障诊断中的应用。基于上述文献研究,本文提出了改进的集成经验模态分解算法(ensembleempiricalmodedecomposition,EEMD)与自回归模型(autoregressivemodel,AR)功率谱估计结合的后视镜驱动器故障诊断方法。
首先,使用EEMD算法将后视镜驱动器振动信号分解成若干个本征模态函数(intrinsicmodefunction,IMF)信号,通过峭度谱与相关系数结合的方法筛选出有效的IMF分量。其次,对有效IMF分量进行AR功率谱估计,得到AR累加谱后,再利用特征频率的平均能量进行模式分类与识别。最后,比较了几种现有模型进行故障诊断的实时性与识别率,总结了EEMD-AR-支持向量机(supportvectormachine,EEMD-AR-SVM)方法进行电动后视镜驱动器故障诊断的优势。
1算法理论
1.1集成经验模态分解
EEMD方法[15]是对经验模态分解方法[16]的改进,主要特点在于通过加入高斯白噪声取平均值,求得本征模态函数成分来抑制EMD方法中存在的模态混叠现象。其主要步骤为:(Ⅰ)对于后视镜驱动器的振动信号S(n),添加均值为0、标准差为δ的白噪声序列mi(n),得到加噪信号的表达式为Si(n)=S(n)+mi(n)。其中:Si(n)为第i次加入白噪声的振动序列信号;mi(n)为第i次加入的白噪声序列。(Ⅱ)利用经验模态分解的方法,将Si(n)分解成若干个IMFi与一个余项函数ri(n)。
(Ⅲ)循环重复步骤(Ⅰ)与步骤(Ⅱ),最后利用公式IMFi=1NΣNi=1IMFi计算得到IMF的均值。其中,N表示加入白噪声实验的次数。针对后视镜驱动器振动信号的特点,本文设定EEMD方法中的N为15,σ设置为0.2,一方面符合了EEMD方法设定高斯白噪声与加噪次数的要求;另一方面能够保证在不引起模态混叠现象的同时,引入较小的噪声,减少对原始信号的影响[17]。
1.2AR功率谱估计方法传统的谱估计方法对数据长度有较高的要求,其分辨率取决于数据长度,相比于现代谱估计方法,其分辨率较低,且容易受到窗函数的影响,发生频谱泄露,产生虚假的峰值。现代谱估计方法能够弥补传统谱估计分析的局限之处。其中,AR谱估计是较为常用的一种分析方法[18],由于其频率分辨率高以及计算量小的特点,得到了广泛的研究和应用。
1.3峭度与相关的有效IMF分量筛选
相关系数表征了一个序列与另一个序列的相关程度[21]。本征模态函数IMF的选择过程中,通常认为IMF分量与原始信号序列S(n)相关系数较大的分量为有效的本征模态分解分量;相关系数较小的分量为虚假的本征模态分量,应当剔除。时域特征中的峭度系数对偶发冲击信号敏感,若振动信号中存在强烈的冲击,则该指标会偏高;若振动信号较为平稳,则其峭度系数较小。观察后视镜驱动器的振动信号,在断齿与外壳干涉这两类故障样品中都存在冲击成分。较高的峭度系数则可以反映振动信号存在较多的冲击故障信息,利用峭度系数,结合相关系数,可以剔除掉虚假的IMF分量。
经过大量实验分析,本文设定相关系数的阈值为0.3,峭度系数的阈值为4,若分解后的IMF分量与原始信号的相关系数大于0.3,并且峭度系数小于4,可认为该IMF分量为有效的IMF分量;而不满足该判定条件的分量则被认定为虚假的IMF分量,应当被剔除。筛选出的每一阶有效IMF分量进行AR功率谱估计,调整相加后得到信号的AR累加谱,对AR累加谱特征频率与振幅进行特征提取,以此作为特征向量进行分类器的训练,从而可以分别对健康、断齿和外壳干涉的后视镜驱动器进行故障检测。
2实验分析
2.1实验设备及数据采集
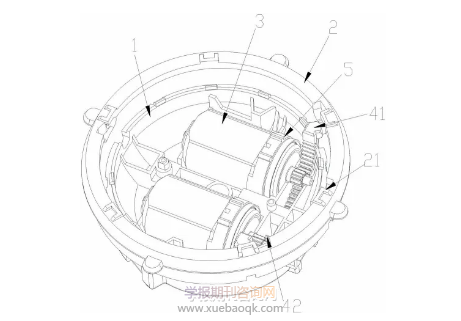
选择的放大倍数为100倍;加速度振动传感器放置于后视镜驱动器表面,测量振动的加速度信号。输入电压控制在16V,采样频率设置为5kHz,为保证采样信号中含有若干个冲击故障周期,设置采样时间为1s,每个样本含有数据采样点个数为50000个。描述了待测试后视镜驱动器样本的内部结构,主要由1对对称的微型电动机、2套减速齿轮组合与电源接口组成。其中,每套减速齿轮组合均包括:2组蜗轮蜗杆减速机构、1组圆柱齿轮减速机构和1组圆锥齿轮减速机构,进而构成四级减速系统。
2.2算法与应用分析
首先通过振动传感器与测试工装,分别获取健康驱动器、断齿驱动器和外壳干涉驱动器样本的振动信号,观察其时域信号波形与频谱。根据时频域特征提取结合支持向量机分类的方法,对后视镜驱动器样本进行分类识别,仅能达到83.7%的准确率,添加特征降维的方法虽然减少了消耗时间,但是由于维数降低,导致识别准确率反而下降;单纯的EMD方法在提取IMF后,将其作为特征向量进行支持向量机的分类,则会因为维数太过巨大,引起维度灾难的问题,导致消耗时间延长,并且无法得到一个较为精确的识别结果。本文提出的模型方法以消耗计算资源的代价能够获得超过90%的识别准确率,可以实际应用于汽车电动后视镜驱动器生产与质量检测的过程之中。
3结论
(1)讨论了一种EEMD-AR-SVM的方法,能够有效地针对汽车电动后视镜驱动器振动信号中的非线性、非稳态、存在严重周期性冲击的特点,提取振动信号的特征频率和振幅的特征。(2)针对电动后视镜驱动器这一研究对象,得到筛选有效IMF分量的峭度系数阈值为4,相关系数为0.3。筛选出有效IMF分量后,使用AR功率谱估计得到累加谱,提取特征频率与振幅,利用支持向量机进行学习与分类,分类准确率能够达到93.9%。(3)相比于时频域特征提取分类和EMD方法的特征提取分类,该方法虽然消耗了大量的时间,但是有更高的识别准确率,更适用于工业自动化生产的检测中。
参考文献:
[1]杨丽娟,张白桦,叶旭桢.快速傅里叶变换FFT及其应用[J].光电工程,2004,31(z1):1-3,7.
[2]倪雪,王华力,徐志军,等.基于STFT-SST和深度卷积网络的多相码雷达信号识别[J].数据采集与处理,2020,35(6):1090-1096.
[3]王豪,董广明,陈进,等.线调频小波WVD用于非平稳信号分析研究[J].北京信息科技大学学报(自然科学版),2020,35(5):5-8,70.
[4]BAGARIAR,WADHWANIS,WADHWANIAK.Awavelettransformandneuralnetworkbasedsegmentation&classificationsystemforbonefracturedetection[J].Optik,2021,236:166687.
[5]潘越.基于云计算FFT的机械故障诊断系统设计与实现[D].北京:北京邮电大学,2019.
[6]李恒,张氢,秦仙蓉,等.基于短时傅里叶变换和卷积神经网络的轴承故障诊断方法[J].振动与冲击,2018,37(19):124-131.
作者:高丰,朱少成,罗石
转载请注明来源。原文地址:http://www.xuebaoqk.com/xblw/6705.html
《基于改进的经验模态分解的后视镜驱动器故障诊断方法》